
 EN
EN
 AR
AR
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 IS
IS
 AZ
AZ
 UR
UR
 BN
BN
 HA
HA
 LO
LO
 MR
MR
 MN
MN
 PA
PA
 MY
MY
 SD
SD

เข้าใจความหมายของ dfov และ hfov และ vfov: คู่มือคำอธิบายเชิงลึก
เมื่อออกแบบระบบวิชันแบบฝังตัว (Embedded Vision Systems) เราทุกคนอาจเคยเผชิญกับคำถามว่า กล้องจะมองเห็นโลกโดยรอบที่ต้องโฟกัสได้อย่างชัดเจนได้อย่างไร ในการแก้ปัญหานี้ เราจำเป็นต้องเข้าใจพารามิเตอร์ทางแสงชนิดหนึ่งก่อน นั่นคือ มุมมองของกล้อง (Field of View: FOV) พารามิเตอร์นี้จะกำหนดขอบเขตที่กล้องสามารถมองเห็นได้
ในฐานะที่ปรึกษาที่มีประสบการณ์ยาวนานในด้านโมดูลกล้อง ในบทความนี้ฉันจะอธิบาย FOV หลักทั้งสามแบบ ได้แก่ dFOV, hFOV และ vFOV พร้อมให้ข้อมูลเชิงปฏิบัติที่ช่วยให้คุณตัดสินใจได้อย่างถูกต้องเมื่อเลือกใช้โมดูลกล้อง
มุมมองของกล้อง (Field of View: FOV) หมายถึงอะไร
กล่าวอย่างง่าย มุมมองของกล้อง (Field of View: FOV) หมายถึง ขอบเขตของฉากที่กล้องสามารถจับภาพได้ในขณะหนึ่ง โดยปกติจะวัดค่าเป็นองศา คล้ายกับมุมมองของตาคน และจะกำหนดพื้นที่ที่อุปกรณ์ของคุณสามารถมองเห็นได้
ปริมาตรนี้ไม่เป็นอิสระ มันเกี่ยวข้องกับความยาวจุดเฉพาะของเลนส์กล้อง ขนาดเซ็นเซอร์ และระยะทางในการทํางานของวัตถุที่ถ่ายภาพ ในโลกของเครื่องมองเห็น การเลือก FOV ที่ถูกต้องเหมือนกับการจัดระบบด้วย "ตา" ที่ถูกต้อง สนามมองที่แคบเกินไปอาจพลาดข้อมูลสําคัญ ในขณะที่สนามมองที่กว้างเกินไปอาจทําให้ความละเอียดภาพที่จําเป็นและเพิ่มความบิดเบือนของเลนส์
ดังนั้น การเข้าใจความหมายของ FOV คือขั้นตอนแรกในการออกแบบกล้องใด ๆ
hFOV, VFOV และ DFOV คืออะไร?
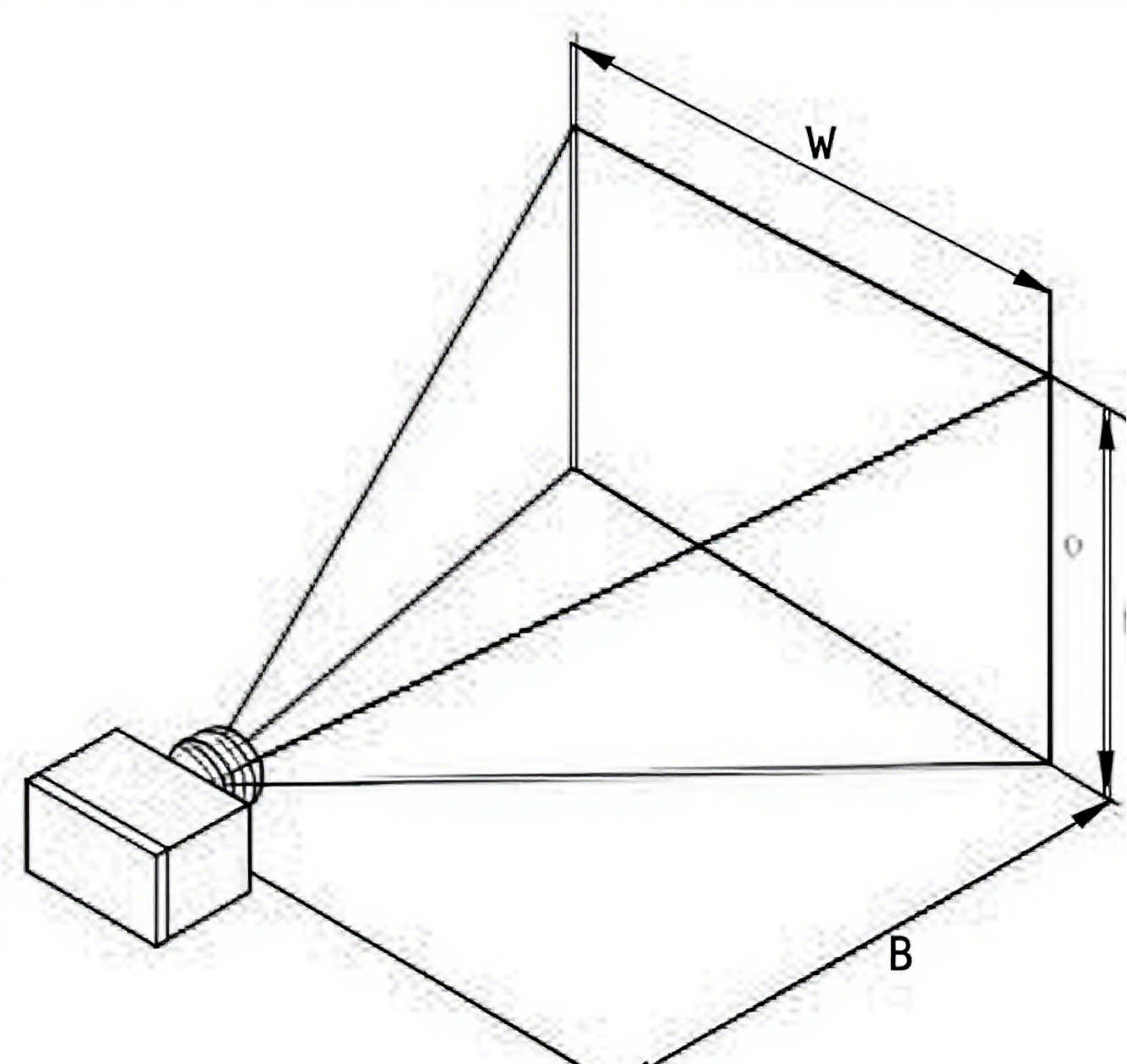
ในโครงการในโลกจริง เราไม่ได้พูดถึง FOV โดยทั่วไป แต่เราแยกมันออกเป็น 3 มิติ ภาพสามตัวนี้รวมกันสร้างสนามมองของกล้อง
สนามมองเห็นแนวราบ (HFOV)
HFOV หรือมุมมองในแนวนอน คือพื้นที่ของฉากที่กล้องสามารถครอบคลุมได้ในทิศทางซ้าย-ขวา ซึ่งกำหนดว่ากล้องของคุณสามารถ "มองเห็น" ได้กว้างเพียงใดในแนวราบ ในหลาย ๆ การประยุกต์ใช้ เช่น การขับขี่อัตโนมัติ การเฝ้าสังเกตอัจฉริยะ และระบบมองเห็นสำหรับหุ่นยนต์ การมีมุมมอง HFOV กว้างจะช่วยลดจุดบอดได้อย่างมีประสิทธิภาพ ทำให้ระบบสามารถจับภาพรถยนต์หรือผู้คนที่เคลื่อนที่อยู่ ซึ่งเป็นปัจจัยพื้นฐานในการออกแบบระบบ
มุมมองในแนวตั้ง (VFOV)
VFOV หรือมุมมองในแนวตั้ง คือการกำหนดช่วงมุมในการมองเห็นของกล้องในทิศทางแนวตั้ง ซึ่งกำหนดว่ากล้องสามารถ "มองเห็น" ได้สูงหรือต่ำเพียงใด สำหรับงานเช่น การถ่ายภาพทางอากาศด้วยโดรน การสแกนบาร์โค้ดบนสายพานลำเลียง และการจดจำใบหน้า การมีมุมมอง VFOV ที่เหมาะสมจะช่วยให้วัตถุเป้าหมายอยู่ภายในเฟรมอย่างสมบูรณ์ แทนที่จะถูกตัดขอบภาพ
มุมมองแบบทแยง (DFOV)
DFOV หรือที่เรียกว่า diagonal field of view หมายถึงมุมมองสูงสุดในแนวทแยงของกล้อง มันรวมคุณสมบัติของ HFOV และ VFOV เข้าด้วยกัน เพื่อให้เป็นข้อมูลอ้างอิงที่ครอบคลุมเกี่ยวกับมุมมองโดยรวม ในแผ่นข้อมูลจำเพาะของผลิตภัณฑ์หลายประเภท มักจะระบุค่า DFOV เป็นอันดับแรก เนื่องจากให้ภาพรวมที่ชัดเจนและครอบคลุมเกี่ยวกับมุมมอง อย่างไรก็ตาม เมื่อออกแบบคุณสมบัติเฉพาะ ยังคงจำเป็นต้องพิจารณาค่า HFOV และ VFOV ที่เป็นรูปธรรมมากกว่า
ความแตกต่างและความสัมพันธ์ระหว่าง HFOV และ VFOV
วิศวกรหลายคนมักจะสับสนเมื่อต้องเผชิญกับคำถามเกี่ยวกับ HFOV และ VFOV โดยทั้งสองค่านี้ไม่ได้มีอยู่แยกจากกัน แต่ถูกกำหนดโดยปัจจัยหลัก ได้แก่ อัตราส่วนภาพ (aspect ratio) ของเซ็นเซอร์ภาพ และความยาวโฟกัส (focal length) ของเลนส์ ตัวอย่างเช่น เซ็นเซอร์มาตรฐานที่มีอัตราส่วน 16:9 จะมีมุมมองแนวนอน (HFOV) กว้างกว่ามุมมองแนวตั้ง (VFOV) เสมอ ซึ่งมีความสัมพันธ์กันแบบสามเหลี่ยมที่คงที่ระหว่างสองค่านี้
นั่นหมายความว่าคุณไม่สามารถเลือก HFOV หรือ VFOV ได้อย่างอิสระ เนื่องจากทั้งสองค่ามีความเกี่ยวข้องและมีข้อจำกัดต่อกัน ในกระบวนการออกแบบจริง ความเชื่อมโยงที่เกิดขึ้นโดยธรรมชาตินี้มักเป็นความท้าทายที่ยากสำหรับวิศวกรในการหาจุดสมดุล
เครื่องคำนวณ HFov VFOV: วิธีการคำนวณอย่างแม่นยำ?
การคำนวณ HFOV และ VFOV อย่างแม่นยำเป็นขั้นตอนสำคัญในการ โมดูลกล้อง เลือกใช้งาน แม้ว่าจะมีเครื่องมือที่สะดวกต่อการใช้งานมากมาย เช่น เครื่องคำนวณ HFOV และ VFOV แต่การเข้าใจหลักการพื้นฐานถือเป็นสิ่งสำคัญสำหรับวิศวกรผู้เชี่ยวชาญ
เราสามารถใช้ตรีโกณมิติพื้นฐานในการหาค่าทั้งสองนี้ได้ หากคุณทราบค่าความยาวโฟกัสของเลนส์ (f) และขนาดของเซนเซอร์ (d) คุณสามารถคำนวณมุมของสนามภาพ (field of view angle) ที่เกี่ยวข้องได้
ตัวอย่างเช่น สูตรสำหรับการคำนวณมุมของสนามภาพในแนวนอนคือ:
HFOV = 2 × arctan(SensorWidth / (2 × FocalLength))
ในทำนองเดียวกัน VFOV สามารถคำนวณได้โดยใช้วิธีการที่คล้ายกัน การเข้าใจและนำสูตรเหล่านี้มาใช้จะช่วยให้คุณออกแบบได้แม่นยำมากยิ่งขึ้น และหลีกเลี่ยงปัญหาที่เกิดจากการค้นพบความไม่ตรงกันของมุมมองในขั้นตอนท้ายของการพัฒนา
ความสำคัญในการเลือก FOV ที่เหมาะสม
การเลือก FOV ที่เหมาะสมเป็นจุดขายสำคัญสำหรับโครงการวิชันระบบฝังตัว (Embedded Vision) ที่ประสบความสำเร็จ อย่างไรก็ตาม การเลือก FOV ที่ไม่เหมาะสมอาจนำไปสู่ปัญหาที่ไม่คาดคิดและมีผลกระทบอย่างรุนแรง
ตัวอย่างเช่น ในระบบนำทางหุ่นยนต์ DFOV ที่กว้างจะช่วยให้หุ่นยนต์รับรู้สภาพแวดล้อมรอบตัวได้อย่างรวดเร็ว แต่ถ้า HFOV มีมุมแคบเกินไป หุ่นยนต์อาจมองไม่เห็นสิ่งกีดขวางด้านข้าง จนนำไปสู่การชนกันได้
อีกตัวอย่างหนึ่ง ในระบบตรวจสอบภายในยานพาหนะ (In-Vehicle Monitoring) คุณต้องการมากกว่าเลนส์มุมกว้างเพียงอย่างเดียว คุณต้องการค่า VFOV ที่แม่นยำเพื่อให้ครอบคลุมผู้โดยสารทุกคน ไม่ใช่แค่เพียงหลังคาหรือแผงหน้าปัดเท่านั้น
ปัญหามักเกิดจากการที่ข้อกำหนดกับสเปกไม่ตรงกัน หากแอปพลิเคชันของคุณต้องการให้สามารถจดจำวัตถุขนาดเล็กจากระยะไกล แต่คุณเลือกใช้เลนส์ที่มีมุมมองภาพแนวทแยง (DFOV) กว้าง พิกเซลเดนซิตี้อาจต่ำเกินไปจนไม่สามารถจดจำได้อย่างมีประสิทธิภาพ และส่งผลให้โครงการล้มเหลวในที่สุด
สรุป: การพิจารณาอย่างรอบด้านเกี่ยวกับ DFOV, HFOV และ VFOV
ในโลกแห่งระบบการมองเห็นด้วยเครื่องจักร ไม่มีมุมมองภาพ (Field of View) แบบ "ที่ดีที่สุด" เพียงแบบเดียว โครงการแต่ละโครงการมีข้อกำหนดที่เป็นเอกลักษณ์ของตนเอง HFOV, VFOV และ DFOV เปรียบเสมือนพิกัดสามมิติที่กำหนดขอบเขตการรับรู้ (Perception Boundaries) ของกล้อง ซึ่งแต่ละมุมมองมีความสำคัญเท่ากัน
การเข้าใจความสัมพันธ์ระหว่างมุมมองทั้งสาม การคำนวณอย่างแม่นยำด้วยเครื่องมือเช่น ตัวคำนวณ HFOV และ VFOV และการตัดสินใจอย่างมีข้อมูลตามความต้องการของสถานการณ์การใช้งานจริง เป็นทักษะที่จำเป็นสำหรับวิศวกรทุกคน เท่านี้คุณจึงจะสามารถมั่นใจได้ว่าโมดูลกล้องของคุณไม่เพียงแค่ "มองเห็น" ได้ดี แต่ยังมองเห็นได้อย่างแม่นยำและชัดเจนจริงๆ ซึ่งจะช่วยเสริมศักยภาพให้กับระบบของคุณอย่างแท้จริง
Muchvision ช่วยคุณแก้ปัญหาด้านมุมมองภาพ (FOV)
ต้องการคำแนะนำจากผู้เชี่ยวชาญเกี่ยวกับความซับซ้อนในการเลือกมุมมอง (FOV) หรือไม่ ติดต่อทีมผู้เชี่ยวชาญของเรา วันนี้ เพื่อช่วยคุณเลือกโมดูลกล้องที่เหมาะสมกับการใช้งานเฉพาะของคุณ ร่วมกัน เราสามารถสร้างโซลูชันวิชันแบบฝังตัวที่ยอดเยี่ยม
สินค้าที่แนะนำ









ข่าวเด่น
-
จีนผู้ผลิตโมดูลกล้องชั้นนํา ผู้ผลิตอุปกรณ์ถ่ายภาพ
2024-03-27
-
คู่มือการปรับแต่งแบบสุดยอด สําหรับโมดูลกล้อง OEM
2024-03-27
-
ความเข้าใจอย่างลึกซึ้งของโมดูลกล้อง
2024-03-27
-
วิธีการลดความละเอียดของโมดูลกล้อง
2024-12-18





