
 EN
EN
 AR
AR
 DA
DA
 NL
NL
 FI
FI
 FR
FR
 DE
DE
 EL
EL
 HI
HI
 IT
IT
 JA
JA
 KO
KO
 NO
NO
 PL
PL
 PT
PT
 RO
RO
 RU
RU
 ES
ES
 SV
SV
 TL
TL
 IW
IW
 ID
ID
 SR
SR
 VI
VI
 HU
HU
 TH
TH
 TR
TR
 FA
FA
 MS
MS
 IS
IS
 AZ
AZ
 UR
UR
 BN
BN
 HA
HA
 LO
LO
 MR
MR
 MN
MN
 PA
PA
 MY
MY
 SD
SD

Begrijp de betekenis van dfov en hfov en vfov: Een Dieptegids
Bij het ontwerpen van embedded visiesystemen hebben we ongetwijfeld allemaal de vraag gehad: hoe kan een camera duidelijk de wereld zien waarop deze moet focussen? Om dit aan te pakken, moeten we eerst een optische parameter begrijpen — het gezichtsveld (FOV). Deze parameter definieert het gezichtsveld van de camera.
Als consultant met uitgebreide ervaring op het gebied van cameramodules, zal ik in dit artikel de drie kern-FOV's uitleggen — dFOV, hFOV en vFOV — en praktische informatie geven om u te helpen bij het maken van een weloverwogen keuze bij het selecteren van een cameramodule.
Wat betekent gezichtsveld (FOV)?
Eenvoudig uitgedrukt verwijst het gezichtsveld (FOV) naar het bereik van het beeld dat een camera op een bepaald moment kan vastleggen. Het wordt meestal gemeten in graden, vergelijkbaar met het menselijk oog, en bepaalt het gebied dat uw apparaat kan zien.
Deze parameter is niet onafhankelijk; deze hangt nauw verbonden met de brandpuntsafstand van de camera-lens, de sensor grootte en de werkafstand van het te fotograferen object. In de wereld van machine vision is het kiezen van het juiste gezichtsveld (FOV) net als het voorzien van het systeem van de juiste "ogen": een te smal gezichtsveld kan cruciale informatie missen, terwijl een te breed gezichtsveld de vereiste beeldresolutie kan verlagen en de lensvervorming kan vergroten – beide zijn veelvoorkomende uitdagingen voor ingenieurs.
Daarom is het begrijpen van de betekenis van FOV de eerste stap in elk camera-ontwerp.
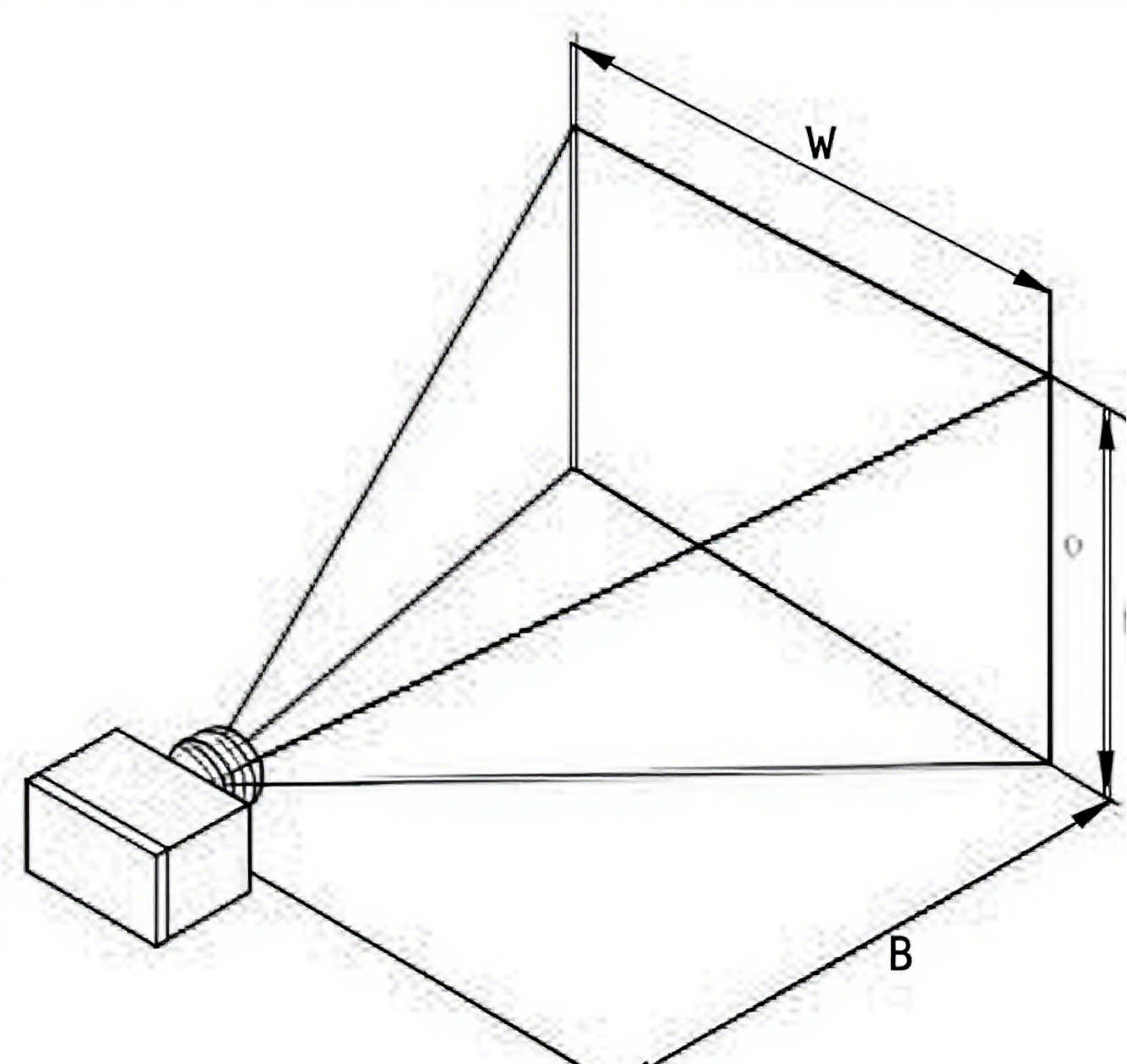
wat zijn HFOV, VFOV en DFOV? De drie belangrijkste gezichtsvelden
In de praktijk praten we niet alleen over een algemeen FOV, maar verdelen we dit in drie specifieke dimensies. Deze drie metriekwaarden vormen samen het volledige gezichtsveld van een camera.
Horizontaal gezichtsveld (HFOV)
HFOV, of horizontaal gezichtsveld, is het gebied van de scène dat een camera kan overdekken in de links-rechts richting. Het bepaalt hoe breed je camera lateraal kan "zien". In veel toepassingen, zoals autonoom rijden, intelligente surveillance en robotvisie, vermindert een breed HFOV effectief blinde vlekken, waardoor het systeem bewegende voertuigen of voetgangers kan registreren en een fundamenteel aspect is van het systeemontwerp.
Verticaal gezichtsveld (VFOV)
VFOV, of verticaal gezichtsveld, definieert het angulaire bereik van de camera's dekking in verticale richting. Het bepaalt hoe hoog of laag de camera kan "zien". Voor taken zoals luchtfotografie met drones, barcode-scanning op een productielijn en gezichtsherkenning, zorgt een geschikt VFOV ervoor dat het doelobject volledig binnen het frame blijft, in plaats van afgeknipt te worden door de randen.
Diagonaal gezichtsveld (DFOV)
DFOV, ook bekend als diagonaal gezichtsveld, verwijst naar het maximale diagonale gezichtsveld van de camera. Het combineert de kenmerken van HFOV en VFOV en biedt een referentie voor de algehele gezichtsveldcapaciteiten. In veel productdatasheets wordt DFOV vaak als eerste vermeld, omdat het een intuïtief en uitgebreid overzicht biedt van het gezichtsveld. Bij het ontwerpen van specifieke functies is het echter nog steeds belangrijk om terug te keren naar de praktischere metriek van HFOV en VFOV.
Het verschil en de relatie tussen HFOV en VFOV
Ingenieurs zien zich vaak geconfronteerd met de keuze tussen HFOV en VFOV. Ze bestaan niet onafhankelijk van elkaar, maar worden bepaald door een kernfactor: de beeldverhouding van de beeldsensor en de brandpuntsafstand van de lens. Een gangbare sensor met een verhouding van 16:9 heeft bijvoorbeeld altijd een breder horizontaal gezichtsveld dan het verticale gezichtsveld, wat een vaste driehoekige meetkundige relatie tussen de twee inhoudt.
Dit betekent dat je niet zomaar horizontaal of verticaal beeldveld (HFOV of VFOV) kunt kiezen; zij zijn met elkaar verbonden en wederzijds beperkend. In praktische ontwerpen vereist dit vaak een pijnlijk evenwichtsproces voor ingenieurs.
HFOV VFOV Calculator: Hoe Accuraat te Berekenen?
Het nauwkeurig berekenen van HFOV en VFOV is een essentiële stap in de camera Module selectie. Hoewel er veel handige tools beschikbaar zijn, zoals HFOV- en VFOV-rekenmachines, is het begrijpen van de onderliggende principes cruciaal voor professionele ingenieurs.
We kunnen gebruikmaken van basistrigonometrie om deze waarden af te leiden. Als je de brandpuntsafstand van de lens (f) en de sensorafmeting (d) kent, kun je de bijbehorende beeldhoek berekenen.
Bijvoorbeeld, de formule voor het berekenen van de horizontale beeldhoek is:
HFOV = 2 × arctan(SensorBreedte / (2 × Brandpuntsafstand)).
Evenzo kan VFOV op een vergelijkbare manier worden berekend. Het begrijpen en toepassen van deze formules helpt u bij het behalen van nauwkeurigere ontwerpen, waardoor het vervelende ontdekkingsmoment van beeldveld-afwijkingen laat in de ontwikkeling wordt vermeden.
Het belang van het kiezen van het juiste gezichtsveld (FOV)
Het juiste gezichtsveld (FOV) kiezen is een belangrijk verkoogpunt voor een succesvol project op het gebied van beeldverwerking. Echter, het verkeerde gezichtsveld kan leiden tot onverwachte en grote problemen.
Bijvoorbeeld, bij robotnavigatie stelt een breed DFOV de robot in staat om snel zijn omgeving waar te nemen. Als de HFOV echter te smal is, kan dit leiden tot het missen van obstakels aan de zijkant en daardoor een botsing veroorzaken.
Nog een voorbeeld: bij in-vehicle monitoring heeft u meer nodig dan alleen een groothoeklens. U hebt een nauwkeurige VFOV nodig om ervoor te zorgen dat alle passagiers volledig in beeld zijn, en niet alleen het dak of het dashboard.
Problemen ontstaan vaak uit een mismatch tussen eisen en specificaties. Als uw toepassing vereist dat kleine objecten op afstand worden herkend, maar u kiest een lens met een breed DFOV, dan kan de pixel dichtheid te laag zijn voor effectieve herkenning, wat uiteindelijk leidt tot projectmislukking.
Samenvatting: Algemene overwegingen voor DFOV, HFOV en VFOV
In de wereld van machine vision is er geen enkelvoudig 'optimale' gezichtsveld. Elk project heeft zijn eigen unieke eisen. HFOV, VFOV en DFOV zijn als de driedimensionale coördinaten die het 'waarnemingsbereik' van een camera definiëren, elk essentieel.
Het begrijpen van hun onderlinge relatie, het maken van nauwkeurige berekeningen met tools zoals een HFOV- en VFOV-rekenmachine en het nemen van weloverwogen beslissingen op basis van de behoeften van het concrete toepassingsscenario zijn essentiële vaardigheden voor elke ingenieur. Alleen op die manier kunt u ervoor zorgen dat uw camera-module niet alleen goed ziet, maar ook accuraat en duidelijk, en daadwerkelijk bijdraagt aan de kracht van uw systeem.
Muchvision helpt u met FOV-oplossingen
Heeft u deskundige begeleiding nodig bij de complexiteit van het kiezen van het gezichtsveld (FOV)? Neem contact op met ons team van experts vandaag om u te helpen het juiste camera-element te kiezen voor uw specifieke toepassing. Samen kunnen we een uitstekende embedded vision-oplossing creëren.














